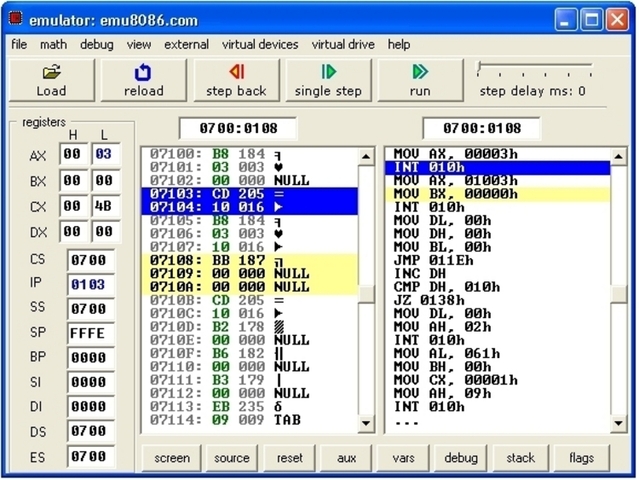
El emu8086 es un emulador del microprocesador 8086 (Intel o AMD compatible) con assembler
integrado. A diferencia del entorno de programación en assembler utilizado anteriormente en la cátedra
(MASM), este entorno corre sobre Windows y cuenta con una interfaz gráfica muy amigable e intuitiva
que facilita el aprendizaje el lenguaje de programación en assembler.
Dado que en un entorno emulado de microprocesador no es posible implementar una interfaz real de
entrada/salida, el emu8086 permite interfacear con dispositivos virtuales y emular una comunicación con
el espacio de E/S. Para esto, el emu8086 cuenta con una serie de dispositivos virtuales preexistentes en
el software base, listos para ser utilizados, entre los que se encuentran una impresora, un cruce de calles
con semáforos, un termómetro, un motor paso a paso, etc. No obstante, la cátedra ha desarrollado
dispositivos adicionales con características particulares para la realización del segundo trabajo práctico.
Se muestra a continuación una tabla comparativa con las diferencias entre el entorno de programación
en assembler utilizado anteriormente en la cátedra (MASM 6.11) y el nuevo emu8086:
Conseguirás que tu ordenador funcione exactamente como lo haría si tuviera instalado el microprocesador realmente.
Este es el modo para poder ejecutar aquellos programas que solo funcionan bajo este tipo de procesadores. El emulador funciona como si realmente tuviera instalado este chip y podrás tener acceso a las mismas funciones que tendrías del otro modo: muestra registros, variables, marcas, memoria...
Emu8086 puede crear su propio sistema y grabar su código binario en un disquete. Incluye conexión para determinados dispositivos pero podrás añadirle los que necesites.
La conversión entre numeración binaria y hexadecimal es sencilla. Lo primero que se hace para una conversión de un número binario a hexadecimal es dividirlo en grupos de 4 bits, empezando de derecha a izquierda. En caso de que el último
grupo (el que quede más a la izquierda) sea menor de 4 bits se rellenan los faltantes con ceros.
En este modo, los datos son proporcionados directamente como parte de la instrucción.
Ejemplo:
Mov AX,34h ;
Copia en AX el número 34h hexadecimal Mov CX,10 ;
Copia en CX el número 10 en decimal
.COMMENT
Programa: Push Pop.ASM
Descripción: Este programa demuestra el uso de las instrucciones para el manejo de la pila, implementando la instrucción XCHG con Push y Pop
MODEL tiny
.CODE
Inicio: ;Punto de entrada al programa
Mov AX,5 ;AX=5
Mov BX,10 ;BX=10
Push AX ;Pila=5
Mov AX,BX ;AX=10
Pop BX ;BX=5
Mov AX,4C00h ;Terminar programa y salir al DOS
Int 21h ;
END Inicio
END
La pila es un grupo de localidades de memoria que se reservan para contar con un espacio de almacenamiento temporal cuando el programa se está ejecutando.
La pila es una estructura de datos del tipo LIFO (Last In First Out), esto
quiere decir que el último dato que es introducido en ella, es el primero que saldrá al sacar datos de la pila.
Para la manipulación de la pila ensamblador cuenta con dos instrucciones especificas, las cuales son las siguientes:
Push:
Esta instrucción permite almacenar el contenido del operando dentro de la última posición de la pila.
Ejemplo:
Push ax El valor contenido en ax es almacenado en el último espacio de la pila.
Pop:
Esta instrucción toma el último dato almacenado en la pila y lo carga al operando.
Ejemplo:
Pop bx El valor contenido en el último espacio de la pila se almacena en el registro
El siguiente ejemplo muestra como implementar la instrucción XCHG por medio de las instrucciones Push y Pop. Recuerde que la instrucción XCHG intercambia el contenido de sus dos operandos.
.COMMENT Programa: Push Pop.ASM Descripción: Este programa demuestra el uso de las instrucciones para el manejo de la pila, implementando la instrucción XCHG con Push y Pop MODEL tiny .CODE Inicio: ;Punto de entrada al programa Mov AX,5 ;AX=5 Mov BX,10 ;BX=10 Push AX ;Pila=5 Mov AX,BX ;AX=10 Pop BX ;BX=5 Mov AX,4C00h ;Terminar programa y salir al DOS Int 21h ; END Inicio END
Dentro de ensamblador se pueden llevar a cabo las 4 instrucciones aritméticas básicas, cada una de ellas cuenta con su propia función:
Instrucción de Suma ADD:
Suma los operandos que se le dan y guarda el resultado en el primer operando.
Ejemplo
ADD al, bl: Suma los valores guardados en los registros al y bl, almacenando el resultado en al.
Instrucción de Resta SUB:
Resta el primer operando al segundo y almacena el resultado en el primero.
Ejemplo:
SUB al, bl: Resta el valor de AL al de BL y almacena el resultado en AL.
Instrucción de multiplicación MUL:
Multiplica el contenido del acumulador por el operando, a diferencia de los métodos anteriores, solo es necesario indicar el valor por el que se multiplicará, ya que el resultado siempre es almacenado en el registro AX.
Ejemplo:
MUL DX: Multiplica el valor del registro acumulador (AX) por el de DX.
Instrucción de división DIV:
Divide un numero contenido en el acumulador entre el operando fuente, el cociente se guarda en AL o AX y el resto en AH o DX según el operando sea byte o palabra respectivamente. Es necesario que DX o AH sean cero antes de la operación por lo que es necesario utilizar el ajuste de división antes del la instrucción DIV.
Ejemplo:
AAM: Ajuste ASCII para la división.
DIV bl: Instrucción que divide los valores en ax y bl.
En ensamblador existen dos instrucciones que cumplen con el propósito de aumentar o reducir el valor contenido dentro de un registro.
INC:
Incrementa en uno el valor contenido dentro del registro que se le dé como parámetro.
INC al: Aumenta en 1 el valor del registro al.
DEC:
Reduce en uno el valor contenido dentro del registro que se le dé como parámetro.
DEC al: Reduce en 1 el valor del registro al.
Son las instrucciones más básicas a la hora de hacer operaciones con registros: INC incrementa el valor de un registro, o de cualquier posición en memoria, en una unidad, y DEC lo decrementa.
Las instrucciones JMP,Jnnn y LOOP requieren de un operador que se refiere a la etiqueta de una instrucciones.
Salto incondicional (JMP)
Una instrucción usada mas comúnmente para la transferencia de control es la instrucción de JMP. Un salto es incondicional, ya que la operación transfiere el control bajo cualquier circunstancia.
Una operación JMP dentro del mismo segmento puede ser corta o cercana. En su primer paso por un programa fuente, el ensamblador genera la longitud de cada una de las instrucciones. Sin embargo, una instrucción JMP puede ser de dos o tres bytes de longitud. Este tipo de operaciones al ir a una etiqueta dentro de -128 a +127 bytes , se considera un salto corto.
Instrucción LOOP
Esta instrucción requiere de un valor inicial en el registro CX. En cada iteracion, LOOP de forma automática disminuye 1 de CX. Si el valor en el registro CX es cero, el control pasa a la instrucción siguiente; sino es así y CX no es igual a cero, el control pasa a la dirección del operando. La distancia debe ser un salto corto, desde -128 hasta +127 bytes. Para una operación que exceda este limite, el ensamblador envía un mensaje como "salto relativo fuera de rango".
Tabla de las instrucciones LOOP
Instrucciones de salto condicional
El ensamblador permite usar una variedad de instrucciones de salto condicional que transfiere el control dependiendo de las configuraciones en el registro de banderas. Por ejemplo, puede comparar dos campos y después saltar de acuerdo con los valores de las banderas que la comparación establece.
Finalmente, agregare un sitio de consulta en donde viene un gran catalogo de todas las instrucciones condicionales que podemos encontrar en ensamblador y una breve explicación de cada una de ellas y como se utilizan.
Ejemplo de algunas instrucciones condicionales:
JE. Salto si es equivalente a lo que se compara
JG. Salto si es mas grande a su comparación
JGE. Salto si es mas grande o igual a su compacidad.
JL. Salgo si es menor a lo que se compara.
Salto condicional con banderas
Tabla de saltos condicionales con parámetros dentro de la sintaxis
Los saltos son instrucciones que permiten al programador cambiar el orden de ejecución del programa según sea necesario, dentro de ensamblador existen dos tipos de salto principales: condicionales e incondicionales.
Saltos Incondicionales:
Los saltos incondicionales se utilizan mediante la instrucción JMP, la cual transfiere el control a la línea especificada después de la palabra JMP, la cual puede ser un valor directo o una etiqueta.
También se puede contar como un salto incondicional la instrucción CALL, la cual llama una procedimiento y al terminarla devuelve el control a la línea siguiente de donde se inicio la llamada a procedimiento, pero eso se ve con más detalle en la sección 3.1.
Ejemplo:
Salto: Etiqueta a la que se hará referencia para el salto incondicional.
JMP Salto: Instrucción que indica que el flujo del programa continuara desde la ubicación de la etiqueta Salto.
Saltos Condicionales:
Los saltos condicionales transfieren el control del programa a la ubicación que se les dé como parámetro si al hacer una comparación se cumple la condición establecida en el salto, los saltos condicionales son los siguientes:
JA (Jump if Above):
Salta cuando el valor es superior, su condición es equivalente al salto JNBE (Jump if Not Below or Equal).
JAE (Jump if Above or Equal):
Salta cuando el valor es superior o igual, su condición es equivalente al salto JNB (Jump if Not Below).
JB (Jump if Below):
Salta cuando el valor es menor, su condición es equivalente al salto JNAE (Jump if Not Above or Equal).
JBE (Jump if Below or Equal):
Salta cuando el valor es menor o igual, su condición es equivalente al salto JNA (Jump if Not Above).
JE (Jump if Equal):
Salta cuando el valor es igual.
JZ (Jump if Zero):
Salta cuando el valor es cero.
JNE (Jump if Not Equal):
Salta cuando el valor no es igual.
JNZ (Jump if Not Zero):
Salta cuando el valor no es cero.
JG (Jump if Greater):
Salta cuando el valor es mayor, su condición es equivalente al salto JNLE (Jump if Not Less or Equal).
JGE (Jump if Greater or Equal):
Salta cuando el valor es mayor o igual, su condición es equivalente al salto JNL (Jump if Not Less).
JL (Jump if Less):
Salta cuando el valor es menor, su condición es equivalente al salto JNGE (Jump if Not Greater or Equal).
JLE (Jump if Less or Equal):
Salta cuando el valor es menor o igual, su condición es equivalente al salto JNG (Jump if Not Greater).
Ejemplo:
Salto: Etiqueta a la que se hará referencia para el salto condicional.
CMP al, bl: Comparación entre el valor almacenado en al y el almacenado en bl.
JG Salto: Instrucción que indica que el flujo del programa continuara desde la ubicación de la etiqueta Salto si el valor de al es mayor al de bl.
La comparación y prueba son instrucciones especiales con las que cuenta el microprocesador, estas son CMP y TEST respectivamente.
Comparación (CMP):
Esta instrucción compara los dos valores que se le den como parámetros y modifica las banderas de signo (SF), de cero (ZF) y de acarreo (CF) según sea necesario.
Ejemplo:
CMP ah,10h: Compara el valor almacenado en el registro ah con el valor 10 hexadecimal.
Prueba (TEST):
Verifica que los valores que se le introduzcan como parámetros sean iguales realizando la operación lógica AND, no almacena ningún resultado pero modifica banderas según sea necesario.
Ejemplo:
TEST al, 1: Verifica que el valor almacenado en al sea 1.
Dentro del lenguaje ensamblador no existe el tipo de dato cadena (string en otros lenguajes), por lo que para utilizarla es necesario tratar a las cadenas como un conjunto de caracteres reservados bajo el nombre de una sola variable.
El lenguaje ensamblador cuenta con instrucciones que por su naturaleza sirven para el manejo de cadenas, estas son:
MOVSB:
Mueve un byte desde una localidad de memoria hasta otra.
MOVSW:
Mueve una palabra desde una localidad de memoria hasta otra.
LODSB:
Carga en la parte baja del registro acumulador (AL) el valor de la localidad de memoria determinada por DS:SI.
LODSW:
Carga en el registro acumulador (AX) el valor de la localidad de memoria determinada por DS:SI.
Ejemplo:
Criptografía simétrica
La criptografía simétrica solo utiliza una clave para cifrar y descifrar el mensaje, que tiene que conocer el emisor y el receptor previamente y este es el punto débil del sistema, la comunicación de las claves entre ambos sujetos, ya que resulta más fácil interceptar una clave que se ha transmitido sin seguridad (diciéndola en alto, mandándola por correo electrónico u ordinario o haciendo una llamada telefónica).
Teóricamente debería de ser más fácil conocer la clave interceptándola que probándola una por una por fuerza bruta, teniendo en cuenta que la seguridad de un mensaje cifrado debe recaer sobre la clave y nunca sobre el algoritmo (por lo que sería una tarea eterna reventar la clave, como comenté en un ejemplo de ataque por fuerza bruta).
Para poner un ejemplo la máquina Enigma (que era una maquina de cifrado electromecánica que generaba abecedarios según la posición de unos rodillos que podrían tener distintas ordenes y posiciones) usaba un método simétrico con un algoritmo que dependía de una clave (que más que clave parece un ritual) que está formada por: los rotores o rodillos que usaba, su orden y la posición de cada anillo, siendo esto lo más básico.
La máquina Enigma contaba también con un libro de claves que contenía la clave del día y hacia un poco más difícil encontrar la clave, pero no es una clave lo suficientemente segura como para que no se pudiese reventar, sobretodo cuando los ingleses gracias a los polacos consiguieron el algoritmo, por este motivo la mayoría de los días conseguían la clave.
Y otro inconveniente que tiene este sistema es que si quieres tener un contenido totalmente confidencial con 10 personas tienes que aprenderte o apuntarte (siendo esta forma menos segura) las 10 claves para cada persona.
Criptografía asimétrica
La criptografía asimétrica se basa en el uso de dos claves: la pública (que se podrá difundir sin ningún problema a todas las personas que necesiten mandarte algo cifrado) y la privada (que no debe de ser revelada nunca).
Sabiendo lo anterior, si queremos que tres compañeros de trabajo nos manden un archivo cifrado debemos de mandarle nuestra clave pública (que está vinculada a la privada) y nos podrán mandar de forma confidencial ese archivo que solo nosotros podremos descifrar con la clave privada.
Puede parecer a simple vista un sistema un poco cojo ya que podríamos pensar que sabiendo la clave pública podríamos deducir la privada, pero este tipo de sistemas criptográficos usa algoritmos bastante complejos que generan a partir de la frase de paso (la contraseña) la clave privada y pública que pueden tener perfectamente un tamaño de 2048bits (probablemente imposible de reventar).
Como nos hemos dado cuenta solo cifra una persona (con la clave pública) y la otra se limita a mirar el contenido, por lo que la forma correcta de tener una comunicación bidireccional sería realizando este mismo proceso con dos pares de claves, o una por cada comunicador. Otro propósito de este sistema es también el de poder firmar documentos, certificando que el emisor es quien dice ser, firmando con la clave privada y verificando la identidad con la pública.
Diferencias entre criptografía simétrica y asimétrica
Para empezar, la criptografía simétrica es más insegura ya que el hecho de pasar la clave es una gran vulnerabilidad, pero se puede cifrar y descifrar en menor tiempo del que tarda la criptografía asimétrica, que es el principal inconveniente y es la razón por la que existe la criptografía híbrida.
Criptografía híbrida
Este sistema es la unión de las ventajas de los dos anteriores, debemos de partir que el problema de ambos sistemas criptográficos es que el simétrico es inseguro y el asimétrico es lento.
El proceso para usar un sistema criptográfico híbrido es el siguiente (para enviar un archivo):
Generar una clave pública y otra privada (en el receptor).
Cifrar un archivo de forma síncrona.
El receptor nos envía su clave pública.
Ciframos la clave que hemos usado para encriptar el archivo con la clave pública del receptor.
Enviamos el archivo cifrado (asíncronamente) y la clave del archivo cifrada (asíncronamente y solo puede ver el receptor).
La arquitectura de los procesadores x86 obliga al uso de segmentos de memoria para manejar la información, el tamaño de estos segmentos es de 64kb.
La razón de ser de estos segmentos es que, considerando que el tamaño máximo de un número que puede manejar el procesador esta dado por una palabra de 16 bits o registro, no sería posible acceder a más de 65536 localidades de memoria utilizando uno solo de estos registros, ahora, si se divide la memoria de la pc en grupos o segmentos, cada uno de 65536 localidades, y utilizamos una dirección en un registro exclusivo para localizar cada segmento, y entonces cada dirección de una casilla específica la formamos con dos registros, nos es posible acceder a una cantidad de 4294967296 bytes de memoria, lo cual es, en la actualidad, más memoria de la que veremos instalada en una PC.
Para que el ensamblador pueda manejar los datos es necesario que cada dato o instrucción se encuentren localizados en el área que corresponde a sus respectivos segmentos. El ensamblador accede a esta información tomando en cuenta la localización del segmento, dada por los registros DS, ES, SS y CS, y dentro de dicho registro la dirección del dato específico.
Saltos, ciclos y procedimientos.
Los saltos incondicionales en un programa escrito en lenguaje ensamblador están dados por la instrucción jmp, un salto es alterar el flujo de la ejecución de un programa enviando el control a la dirección indicada.
Un ciclo, conocido también como iteración, es la repetición de un proceso un cierto número de veces hasta que alguna condición se cumpla. En estos ciclos se utilizan los brincos "condicionales" basados en el estado de las banderas. Por ejemplo la instrucción jnz que salta solamente si el resultado de una operación es diferente de cero y la instrucción jz que salta si el resultado de la operación es cero.
Por último tenemos los procedimientos o rutinas, que son una serie de pasos que se usarán repetidamente en el programa y en lugar de escribir todo el conjunto de pasos únicamente se les llama por medio de la instrucción call.
Un procedimiento en ensamblador es aquel que inicie con la palabra Proc y termine con la palabra ret. Realmente lo que sucede con el uso de la instrucción call es que se guarda en la pila el registro IP y se carga la dirección del procedimiento en el mismo registro, conociendo que IP contiene la localización de la siguiente instrucción que ejecutara la UCP, entonces podemos darnos cuenta que se desvía el flujo del programa hacia la dirección especificada en este registro. Al momento en que se llega a la palabra ret se saca de la pila el valor de IP con lo que se devuelve el control al punto del programa donde se invocó al procedimiento. Es posible llamar a un procedimiento que se encuentre ubicado en otro segmento, para ésto el contenido de CS (que nos indica que segmento se está utilizando) es empujado también en la pila.
Como en cualquier otro lenguaje de programación, hay ocasiones en las que es necesario hacer que el programa no siga una secuencia lineal, sino que repita varias veces una misma instrucción o bloque de instrucciones antes de continuar con el resto del programa, es para esto que se utilizan los ciclos.
Existen 5 tipos de ciclos predefinidos en ensamblador, aunque también se pueden crear ciclos personalizados por medio de instrucciones de salto las cuales se verán en la sección 2.6 de este manual.
Los ciclos predefinidos de ensamblador son los siguientes:
LOOP:
Esta función decrementa el valor del registro contador CX, si el valor contenido en CX es cero ejecuta la siguiente instrucción, en caso contrario transfiere el control a la ubicación definida por la etiqueta utilizada al momento de declarar el ciclo.
Ejemplo:
mov cx,25 : Número de veces que se repetirá el ciclo, en este caso 25.
ciclo: Etiqueta que se utilizará como referencia para el ciclo loop.
int 21h: Instrucción contenida dentro del ciclo (puede contener más de una instrucción).
loop: Ciclo loop que transferirá el control a la línea de la etiqueta ciclo en caso de que CX no sea cero.
LOOPE:
Esta función decrementa el valor del registro contador CX, si el valor contenido en CX es cero y ZF es diferente de uno ejecuta la siguiente instrucción, en caso contrario transfiere el control a la ubicación definida por la etiqueta utilizada al momento de declarar el ciclo.
Ejemplo:
ciclo: Etiqueta que se utilizará como referencia para el ciclo loope.
int 21h: Instrucción contenida dentro del ciclo (puede contener más de una instrucción).
loope: Ciclo loope que transferirá el control a la línea de la etiqueta ciclo en caso de que CX no sea cero y ZF sea igual a uno.
LOOPNE:
Esta función decrementa el valor del registro contador CX, si el valor contenido en CX es cero y ZF es diferente de cero ejecuta la siguiente instrucción, en caso contrario transfiere el control a la ubicación definida por la etiqueta utilizada al momento de declarar el ciclo, esta es la operación contraria a loope.
Ejemplo:
ciclo: Etiqueta que se utilizará como referencia para el ciclo loopne.
int 21h: Instrucción contenida dentro del ciclo (puede contener más de una instrucción).
loopne: Ciclo loopne que transferirá el control a la línea de la etiqueta ciclo en caso de que CX no sea cero y ZF sea igual a cero.
LOOPZ:
Esta función decrementa el valor del registro contador CX, si el valor contenido en CX es cero y ZF es diferente de uno ejecuta la siguiente instrucción, en caso contrario transfiere el control a la ubicación definida por la etiqueta utilizada al momento de declarar el ciclo.
Ejemplo:
ciclo: Etiqueta que se utilizará como referencia para el ciclo loopz.
int 21h: Instrucción contenida dentro del ciclo (puede contener más de una instrucción).
loopz: Ciclo loopz que transferirá el control a la línea de la etiqueta ciclo en caso de que CX no sea cero y ZF sea igual a uno.
LOOPNZ:
Esta función decrementa el valor del registro contador CX, si el valor contenido en CX es cero y ZF es diferente de cero ejecuta la siguiente instrucción, en caso contrario transfiere el control a la ubicación definida por la etiqueta utilizada al momento de declarar el ciclo, esta es la operación contraria a loopz.





 Salto condicional con banderas
Salto condicional con banderas





